Hướng dẫn thực hành lập trình PLC ứng dụng - Mô hình cánh tay Robot khí nén 3 xylanh
PHẦN 1: GIỚI THIỆU PHẦN CỨNG, KIỂM TRA KẾT NỐI TRƯỚC KHI LẬP TRÌNH
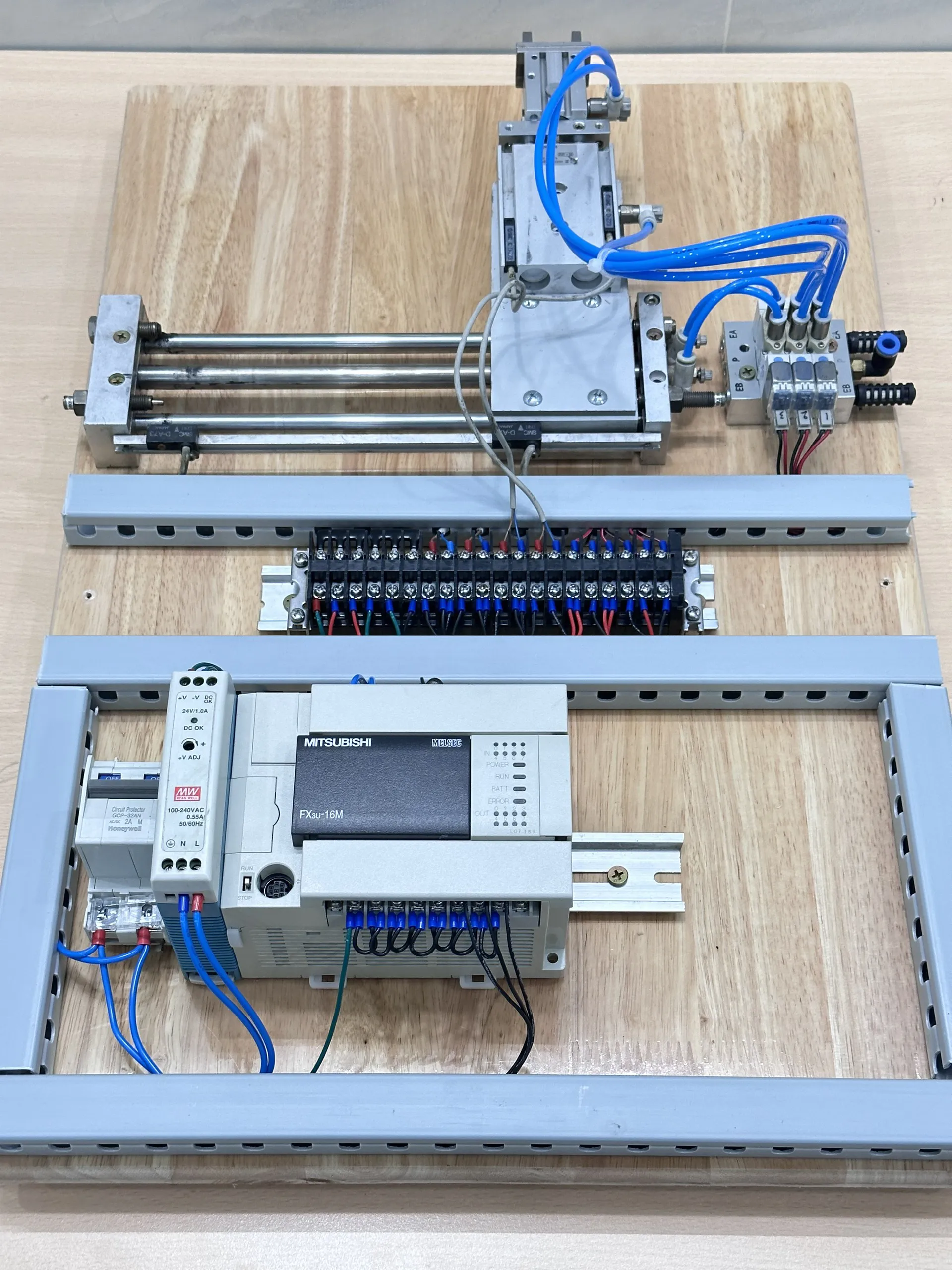
Giới thiệu phần cứng mô hình
Phần cứng có 3 xylanh A (xylanh trượt ngang), B (xylanh trượt dọc gắn kẹp), C (tay kẹp), các cảm biến hành trình trên thân xylanh A, B, van điều hướng 5/2 (loại 1 cuộn coil)
- Thiết bị Input: 4 cảm biến a-1, a-2, b-1, b-2 (chỉ số 1 xác định xylanh ở vị trí ban đầu, chỉ số 2 xác định xylanh ở vi trí được tác động)
- Thiết bị Output: 3 cuộn coil tương ứng với 3 xylanh
- PLC: Loại MT, MR đều phù hợp, có thể lựa chọn mức tích cực Input, Output 0 hoặc 1 đều được
Kết nối phần cứng hệ thống và lập bảng Input, Output
|
Tên thiết bị |
Ký hiệu |
Địa chỉ |
|
Nút nhấn ON |
ON |
M0 |
|
Nút nhấn OFF |
OFF |
M1 |
|
Cảm biến hành trình a-1 |
a-1 |
|
|
Cảm biến hành trình a-2 |
a-2 |
|
|
Cảm biến hành trình b-1 |
b-1 |
|
|
Cảm biến hành trình b-2 |
b-2 |
|
|
Xy lanh A đi ra |
XLA |
|
|
Xy lanh B đi ra |
XLB |
|
|
Xy lanh C đi ra |
XLC |
|
Kiểm tra việc kết nối phần cứng và Test trước khi lập trình
PHẦN 2: HƯỚNG DẪN TỪNG BƯỚC LẬP TRÌNH THEO CÁC YÊU CẦU
TRUNG TÂM TỰ ĐỘNG HÓA CÔNG NGHIỆP THÁI DUY TECH
Địa chỉ: 157/19 TRẦN BÁ GIAO, P.5, Q. Gò Vấp, TPHCM
Hotline: 0905288852
Email: thaiduytech@gmail.com
Khóa học liên quan

PLC FX Ứng dụng - Mô hình 2 (Máy dập tự động)
100.000đ -100%

PLC FX Ứng dụng - Mô hình 3 (Phân loại SP 1 trục)
100.000đ -100%


Chuyên đề: PID ổn định hệ thống công nghiệp với PLC FX (ONLINE)
300.000đ 500.000đ -40%

Chuyên đề: Kỹ Thuật & Các Phương Pháp Lập Trình PLC FX - Online
300.000đ 500.000đ -40%

Chuyên đề: Step – Servo – Điều khiển định vị với PLC FX Online
300.000đ 500.000đ -40%

PLC FX Nâng cao - Online
300.000đ

PLC FX Cơ bản - Online
100.000đ 200.000đ -50%
Xem thêm